
Autonomous Surgical Lamps
Autonomous Surgical Lamps
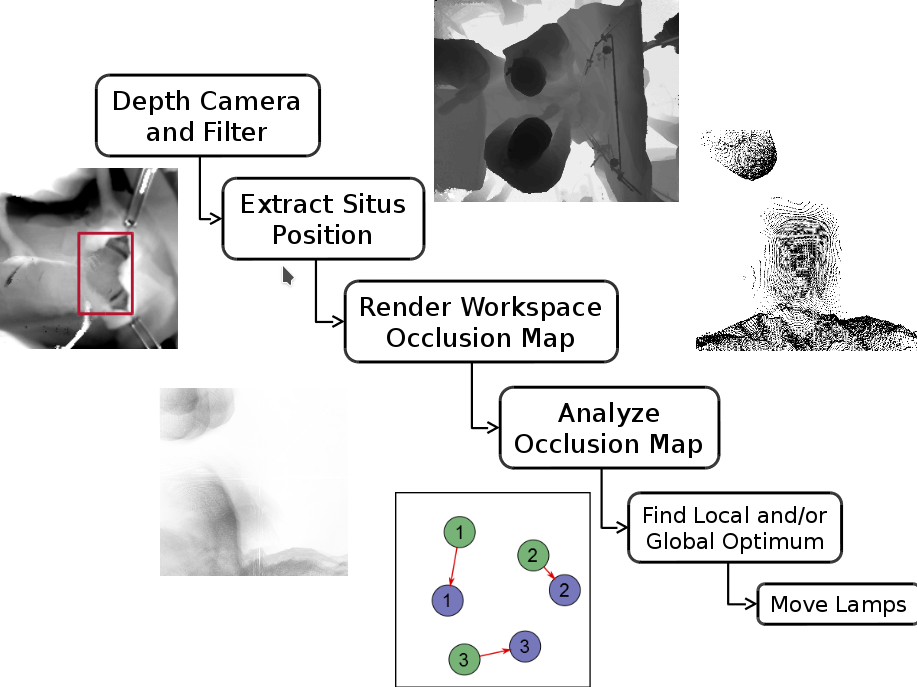
As part of the Creative Unit - Intra-Operative Information, we are developing algorithms for the autonomous positioning of surgical lamps in open surgery. These algorithms work solely on the input of one depth camera, which is positioned above the patient during the surgery. The algorithms identify the operation site (aka the situs) and all possible occlusions. They then move the lamps to avoid occlusions and collisions while optimizing for the least amount of movement feasible over time.
The basic idea is to take the point cloud given by the depth camera and render it from the perspective of the situs towards the working space of the lamps above the operating table. Out of this rendering, we directly get the information, which parts of the lamps workspace are occluded and which not. To be able to minimize the movement over time, we also use information about past occlusions and movements to position the lamps in areas, that are most likely to not be occluded in the future. We arranged the algorithms in a pipeline, which takes the depth image of the depth camera as input, analyzes it to find the situs, and at last outputs the current optimal positions for a given set of lamps.
Projektträger
Laufzeit
Kontakt
Partner
Clinical collaborators of the project:
- Pius Oldenburg Hospital (Department of General and Visceral Surgery) – Clinic director: Priv. Doz. Dr. med. D. Weyhe, Contact person: Dr. rer. nat. V. Uslar
- Klinikum Bremen-Mitte (Department of General and Visceral Surgery) -Clinic director: Prof. Dr. med. H. Bektas, Contact person: D. Blaurock
- Asklepios Klinik Barmbek (Department of General and Visceral Surgery) -Clinic director: Prof. Dr. K. J. Oldhafer