Dorothea Brüggemann, Johanna Michel, Naiana Suter, Matheus Grande de Aguiar, Michael Maas
Beilstein J. Nanotechnology (2020) 11, 991–999.
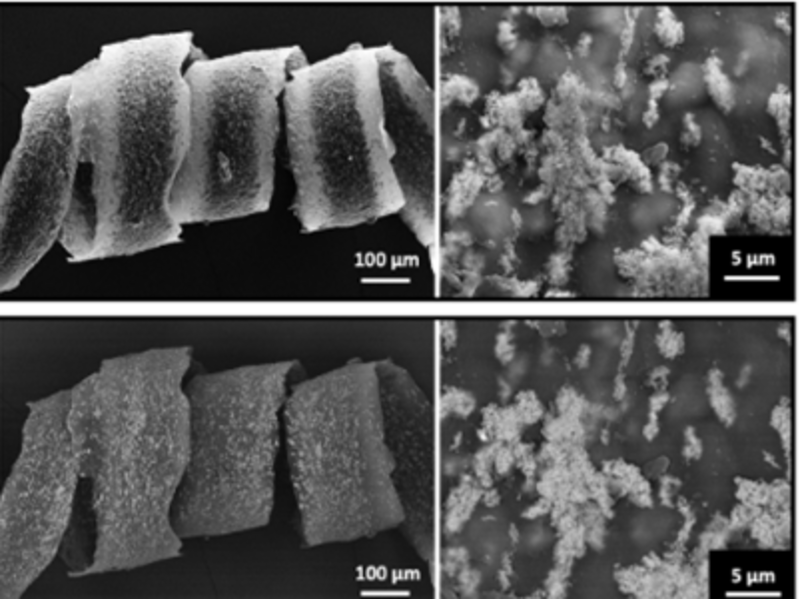
Helical structures can be found in nature at various length scales ranging from the molecular level to the macroscale. Due to theirability to store mechanical energy and to optimize the accessible surface area, helical shapes contribute particularly to motion-driven processes and structural reinforcement. Due to these special features, helical fibers have become highly attractive forbiotechnological and tissue engineering applications. However, there are only a few methods available for the production ofbiocompatible helical microfibers. Given that, we present here a simple technique for the fabrication of helical chitosan microfiberswith embedded magnetic nanoparticles. Composite fibers were prepared by wet-spinning and coagulation in an ethanol bath.Thereby, no toxic components were introduced into the wet-spun chitosan fibers. After drying, the helical fibers had adiameter of approximately 130 μm. Scanning electron microscopy analysis of wet-spun helices revealed that the magnetic nanopar-ticles agglomerated into clusters inside the fiber matrix. The helical constructs exhibited a diameter of approximately 500 μm withone to two windings per millimeter. Due to their ferromagnetic properties they are easily attracted to a permanent magnet. Theresults from the tensile testing show that the helical chitosan microfibers exhibited an average Young’s modulus of 14 MPa. Bytaking advantage of the magnetic properties of the feedstock solution, the production of the helical fibers could be automated. Thefabrication of the helical fibers was achieved by utilizing the magnetic properties of the feedstock solution and winding theemerging fiber around a rotating magnetic collector needle upon coagulation. In summary, our helical chitosan microfibers are veryattractive for future use in magnetic tissue engineering or for the development of biocompatible actuator syste